『アスパラガス収穫ロボット競技会』を開催しました
-知能メカトロニクス学科-
システム科学技術学部 知能メカトロニクス学科では、市販のロボットキットやサーボモーターを用いて、実践的な課題解決に取り組み、解決案を示すPBL講義(プロジェクトベースドラーニング)を実践しています。
その最終段階である「知能メカトロニクス通論Ⅳ(主担当教員:齋藤 敬 教授[専門:医用生体工学])」では、実社会での問題解決を目的とし、農工連携をテーマに各種センサーを駆使したアスパラガス自動収穫ロボットの作製を行っています。アスパラガス自動収穫ロボットの成果を披露する発表会・競技会を7月25日(木)に開催しました。
当日は、10班(各班5~6人)に分かれて、それぞれ製作したオリジナルの「アスパラガス自動収穫システム」を披露し、畑のアスパラガスを自動的に収穫し搬出エリアへと運び、点数を競いました。創意工夫を存分に盛り込んだロボットが次々登場し、白熱した真剣勝負が繰り広げられました。
競技概要
1/2スケールのアスパラガス圃場を想定したフィールドで、収穫に適したアスパラガス(4本)を畝から収穫する。畝には収穫に適したアスパラガスだけではなく、短いもの(2本)、長いもの(1本)、葉付きのもの(1本)があり、それらを収穫した際には減点される。競技時間は3分間であり、この時間内で、調整・修理を行う。また、競技時間内であれば、何度でも再チャレンジが可能。優勝チームのコメント
最初は大型のロボットを作り、何度も試行錯誤を繰り返しては失敗しました。しかし、その結果、畝の片側のアスパラガスをきちんと収穫し、もう一方の畝は思い切って収穫しないという作戦を立てることができました。この戦略が功を奏し、最終的に優勝に繋がりました。
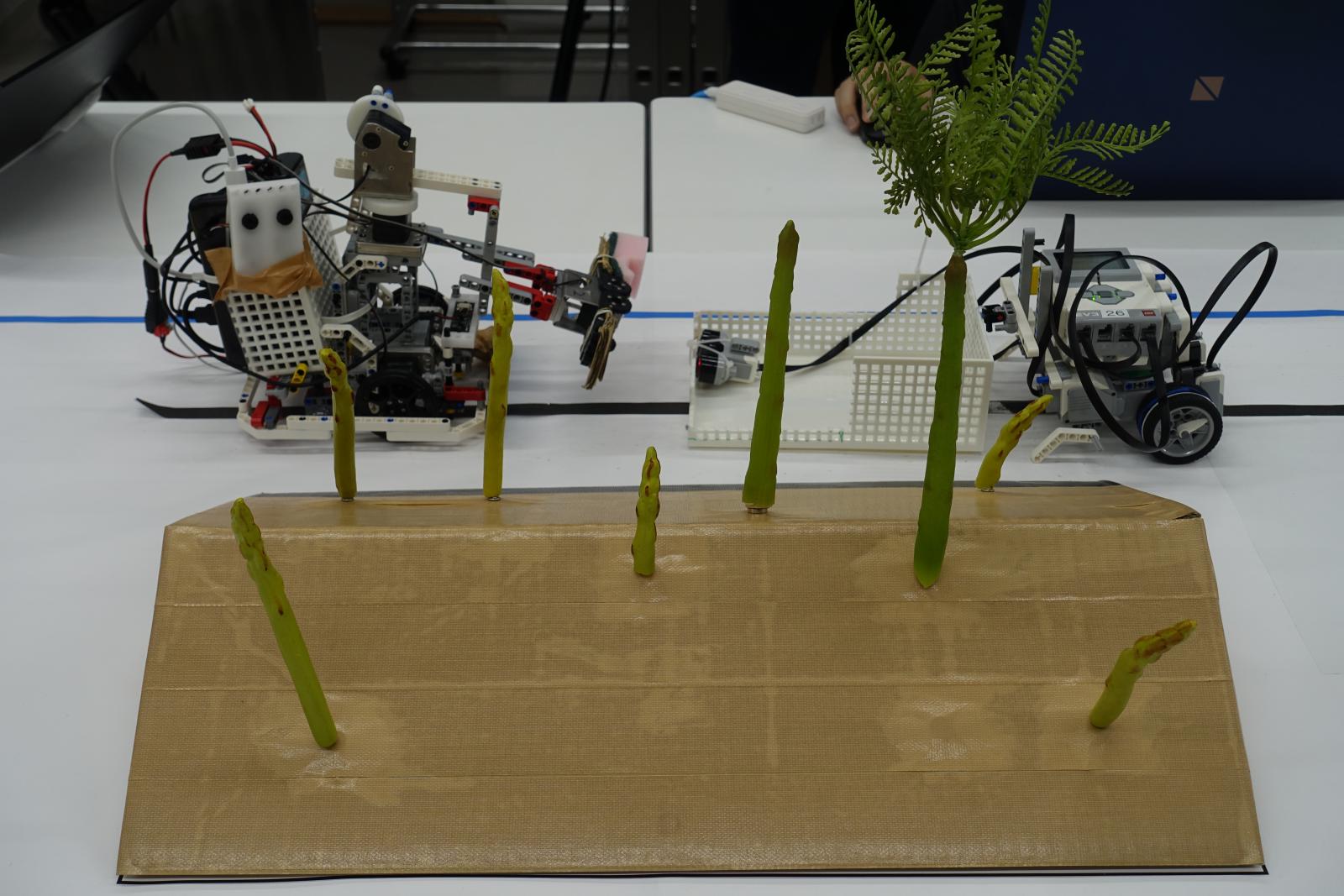
アスパラガス圃場の様子
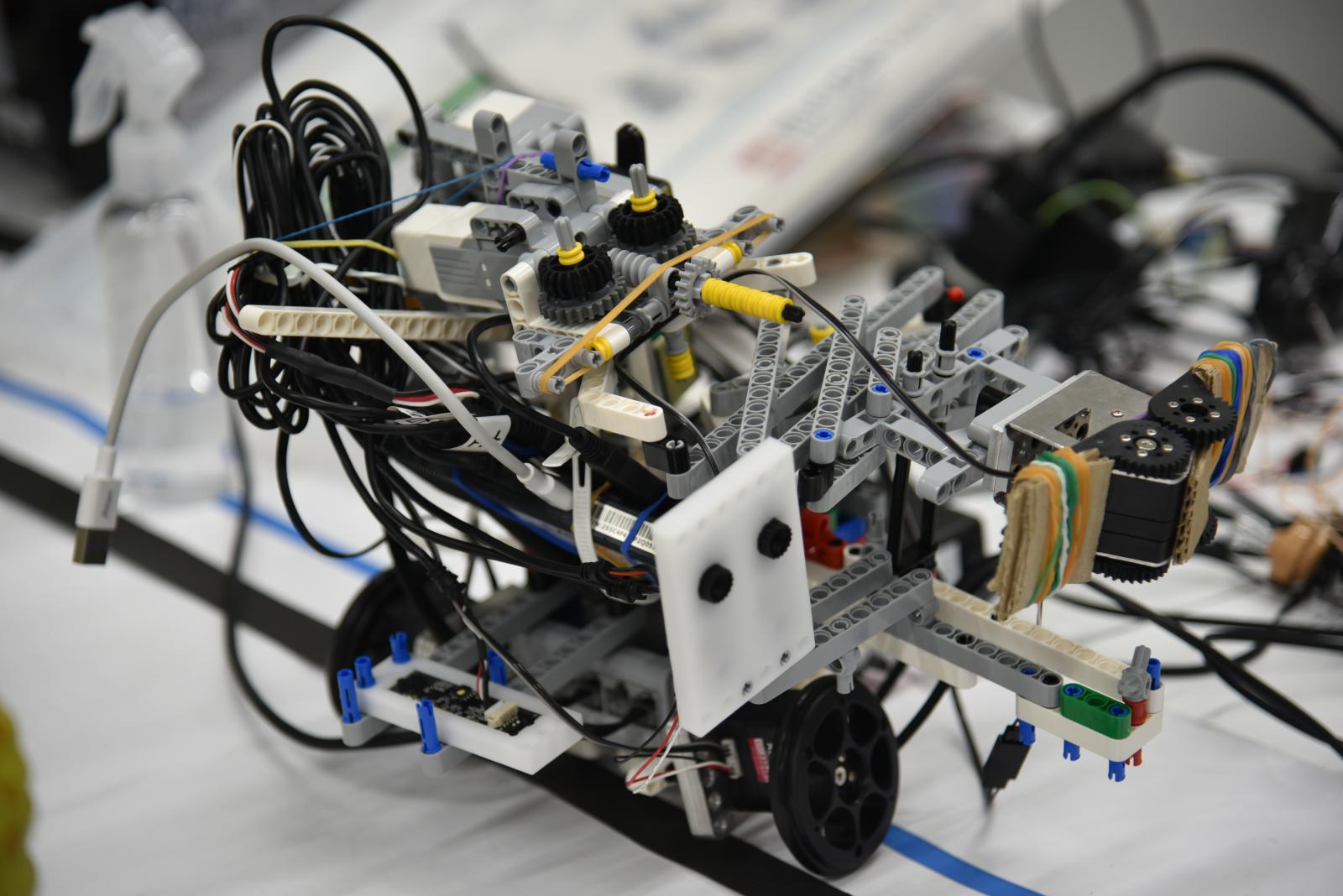
様々なロボットが登場しました

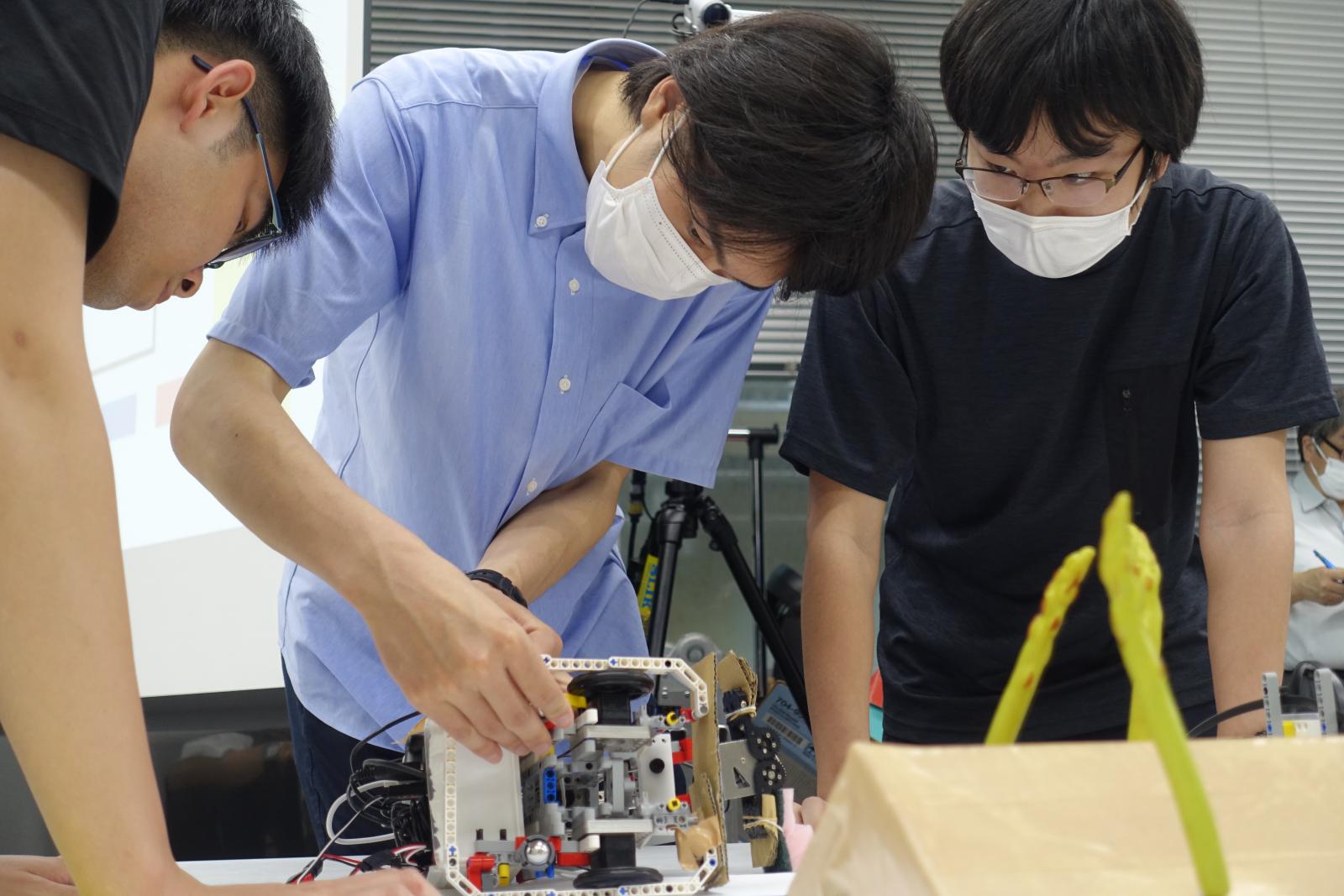
競技会前の打ち合わせ
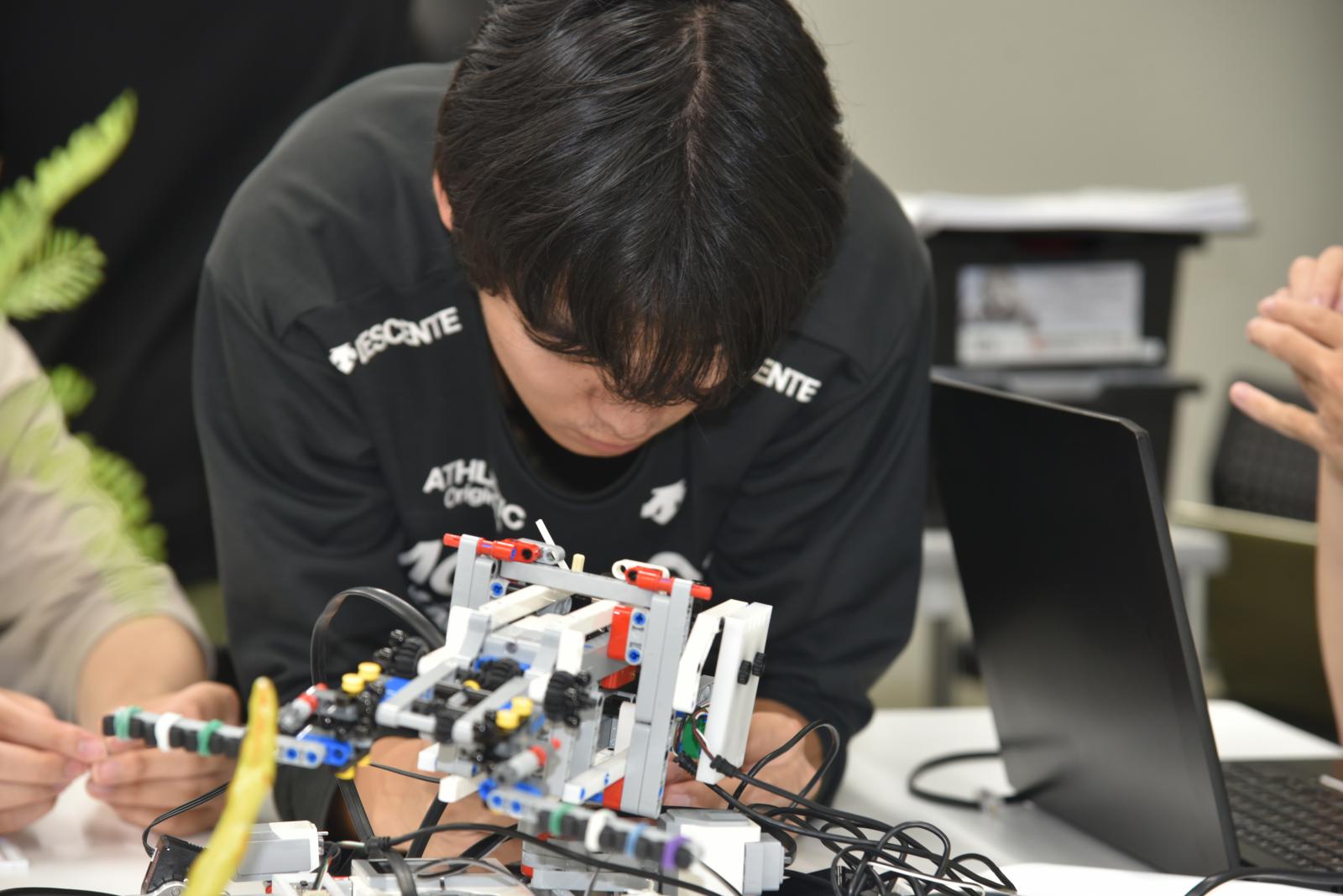
競技前のロボット調整

作製したロボットをプレゼンテーション
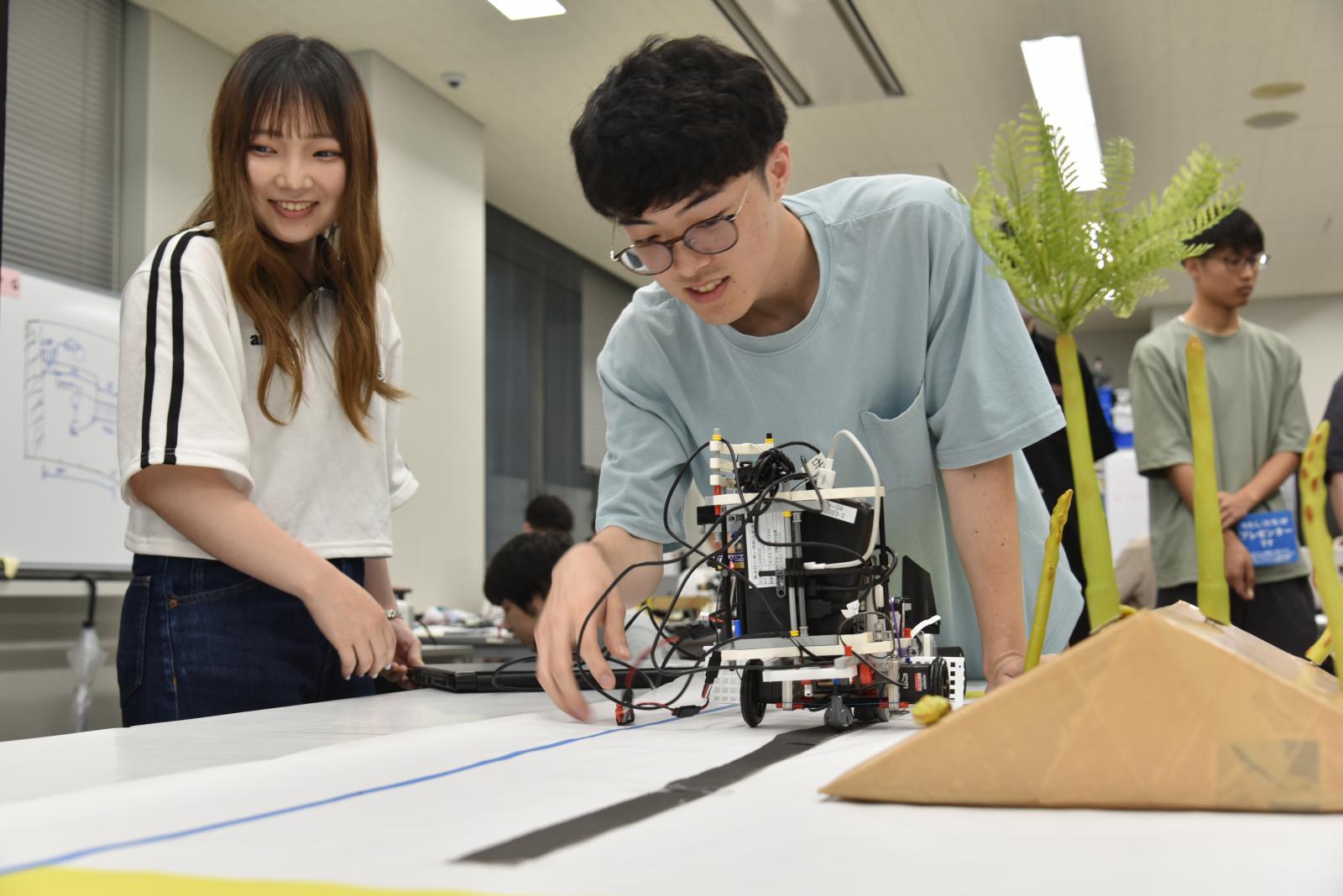
本番用にセッティング
競技中に時間と戦いながら調整
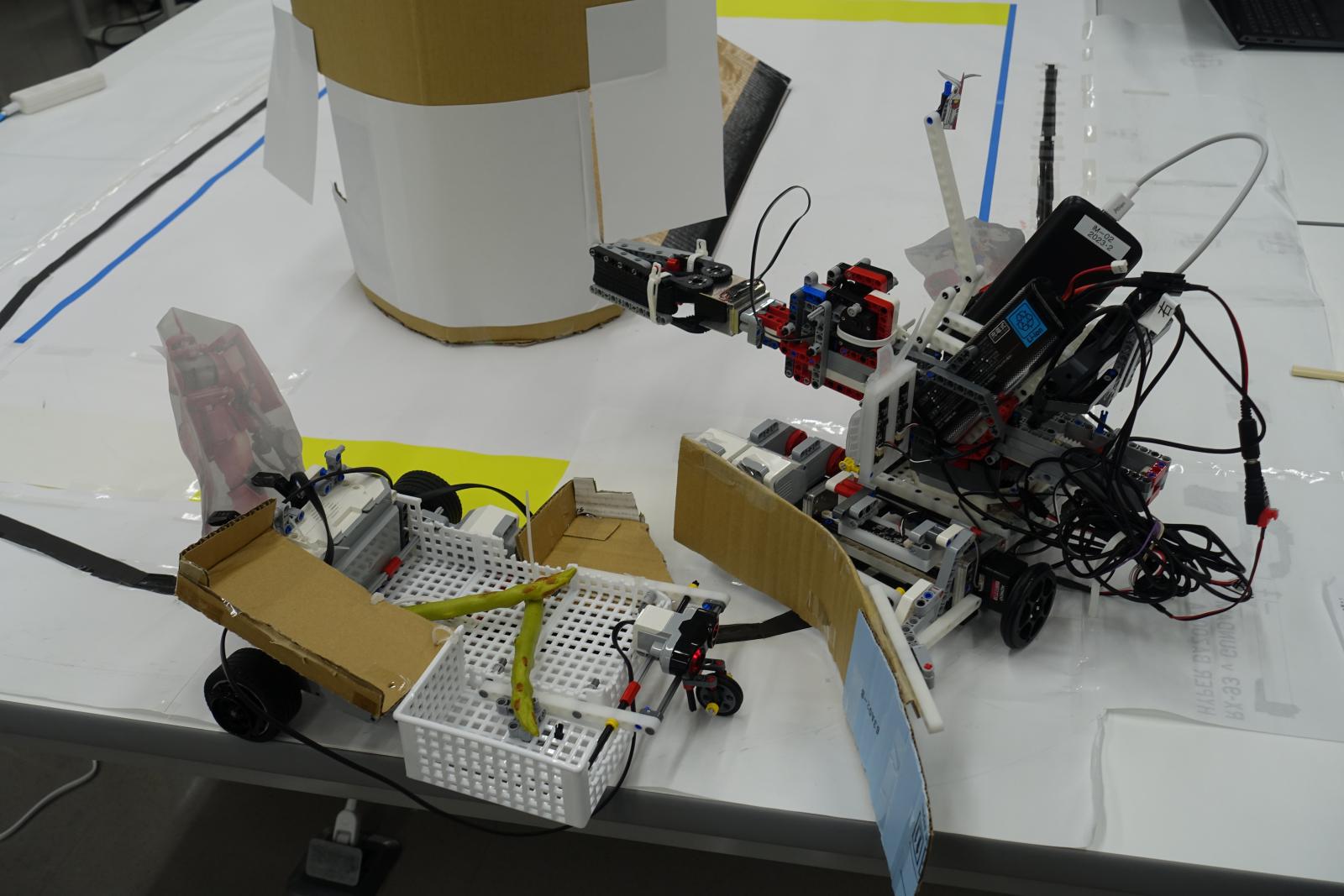
アスパラを収穫して運搬中